
{kind=link}
Atlas yace inmóvil en posición boca abajo sobre colchonetas de gimnasio entrelazadas. La única banda sonora es el zumbido de un motor eléctrico. No es exactamente silencioso, pero no es nada comparado con las sacudidas hidráulicas de sus antepasados.
Mientras la cámara recorre la espalda del robot, sus piernas se doblan a la altura de las rodillas. Es un movimiento natural, al principio, antes de cruzar a un reino extraño, como algo sacado de una película de Sam Raimi. El robot, que parecía estar acostado boca arriba, ha cambiado de posición de manera efectiva con esta inteligente rotación de piernas.
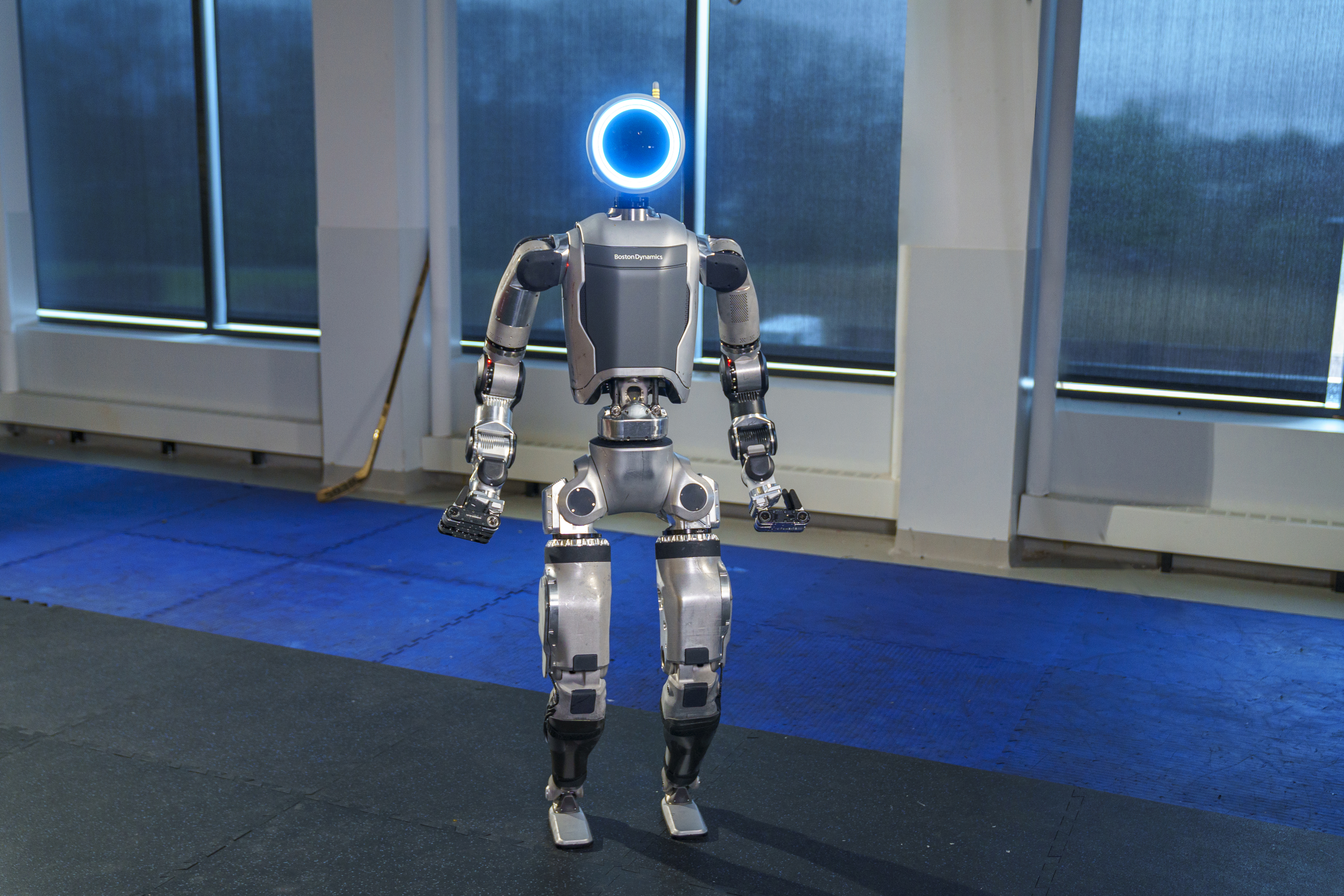
Cuando Atlas está completamente de pie, lo hace de espaldas a la cámara. Ahora la cabeza gira 180 grados, antes de que el torso haga lo mismo. Se queda quieto por un momento, ofreciendo a la cámara su primera visión clara de su cabeza: un anillo de luz que forma el perímetro de una pantalla perfectamente redonda. Una vez más, el torso sigue los 180 grados de la cabeza, mientras Atlas se aleja de la cámara y sale del encuadre.
Un día después de retirar la versión hidráulica de su robot humanoide, Boston Dynamics acaba de anunciar que, al igual que Bob Dylan antes, Atlas se volvió eléctrico.
El ritmo es rápido, los pasos todavía un poco entrecortados, aunque significativamente más fluidos que muchos de los nuevos humanoides comerciales que nos han presentado en los últimos años. En todo caso, el modo de andar recuerda la descarada confianza de Spot, el primo de Atlas cuya rama del árbol evolutivo se separó del humanoide hace unas generaciones.
Atlas completamente nuevo
La nueva versión del robot es prácticamente irreconocible. Atrás quedó el torso pesado, las piernas arqueadas y la armadura plateada. No se encuentran cables expuestos en ninguna parte del nuevo y esbelto esqueleto mecánico. La compañía, que ha evitado las quejas reaccionarias sobre el robopocalipsis durante décadas, ha optado por un diseño más amable y gentil que el Atlas original y los robots más contemporáneos como el Figura 01 y el Tesla Optimus.
La estética del nuevo robot se asemeja más a la de Agility’s Digit y Apptronik’s Phoenix. El robot con cabeza de semáforo tiene un diseño más suave y caricaturesco. Es el “All New Atlas”, según el vídeo. Boston Dynamics se ha opuesto a su propia tendencia al mantener el nombre de investigación de un producto que posicionará para su comercialización. SpotMini se convirtió en Spot. El mango se volvió elástico. Por ahora, sin embargo, Atlas sigue siendo Atlas.
“Podríamos revisar esto cuando realmente estemos listos para construir y entregar en cantidad”, dice a TechCrunch el director ejecutivo de Boston Dynamics, Robert Playter. “Pero creo que por ahora vale la pena mantener la marca”.
La declaración del ejecutivo delata las etapas aún tempranas del proyecto. El cronograma actual de Boston Dynamics tiene al Atlas eléctrico comenzando las pruebas piloto en las instalaciones de Hyundai a principios del próximo año, con la producción completa dentro de unos años.
“Vamos a realizar experimentos con Hyundai in situ a partir del próximo año”, afirma Playter. “Ya contamos con equipos de Hyundai en el lugar. Hemos estado trabajando en esto por un tiempo. Para que esto sea exitoso, debes tener mucho más que tecnología genial. Realmente hay que entender ese caso de uso, hay que tener suficiente productividad para que valga la pena invertir en un robot”.
Haciendo un 180
Créditos de imagen: Dinámica de Boston
Lo más sorprendente del avance de 40 segundos “All New Atlas” son los movimientos del robot. Son un recordatorio de que construir un robot humanoide no requiere hacerlo lo más humano posible. Como me señaló un inversor hace años, miles de millones de años de evolución no nos han convertido a los humanos en máquinas perfectas. Si vamos a crear máquinas a nuestra propia imagen, ¿por qué no construir máquinas que puedan hacer cosas que nosotros no podemos?
“Construimos un conjunto de actuadores personalizados, de alta potencia y muy flexibles en la mayoría de las uniones”, dice Playter. “Ese es un rango de movimiento enorme. Eso realmente reúne el poder de un atleta de élite en este pequeño paquete, y hemos utilizado ese paquete en todo el robot”.
Una cosa que vale la pena tener en cuenta al mirar las imágenes es que Boston Dynamics se ha hecho un nombre a lo largo de décadas de videos virales. Es muy probable que las adiciones recientes al canon muestren los movimientos de baile de un robot como algo realmente útil en un entorno industrial. Por esa razón, es difícil disociar lo que la compañía considera una funcionalidad real y lo que es sólo un poco de alarde.
Comenzar en posición boca abajo, por ejemplo, es una oportunidad para mostrar ese fantástico truco de patas de cangrejo al revés, pero también es práctico. Como Boston Dynamics estuvo más que feliz de mostrar en el video de despedida del Atlas hidráulico, caerse es parte del trabajo, y también lo es levantarse. La verdad del asunto es que la mayor parte de la cosecha actual de robots industriales requiere intervención humana cuando fallan. Por otro lado, un robot que puede simplemente quitarse el polvo y volver a trabajar es una gran ganancia para la productividad.
La capacidad del sistema para funcionar en un abrir y cerrar de ojos también contribuye considerablemente a su potencial de productividad. Me recuerda a las demostraciones de Digit de Agility (la compañía es notablemente la única de su tipo con sistemas de demostración a esta escala), en las que un robot camina hacia un estante, se da vuelta, camina hacia la cinta transportadora, se da vuelta y regresa. Multiplique ese trabajo por cientos (o incluso miles) de veces al día y comenzará a ver el valor de ahorrar preciosos segundos.
“Será capaz de realizar una serie de movimientos que la gente no puede hacer”, explica Playter. “Habrá usos muy prácticos para eso”.
También es importante reducir significativamente el radio de giro del robot en espacios reducidos. Recuerde, estas máquinas están destinadas a ser soluciones abandonadas, es decir, están diseñadas para conectarse a flujos de trabajo existentes en espacios existentes. En última instancia, una mayor maniobrabilidad podría significar la diferencia entre trabajar en un entorno y tener que rehacer el diseño.
cabeza y manos
Créditos de imagen: Dinámica de Boston
Las manos no son nuevas para el video, ya que previamente aparecieron en el modelo hidráulico. Sin embargo, también representan la decisión de la empresa de no basarse exclusivamente en el diseño humano como fuerza rectora. Aquí, la diferencia es tan simple como optar por tres dedos, en lugar de cuatro, en los efectores finales.
“Hay mucha complejidad en una mano”, dice Playter. “Cuando te enfrentas al mundo con actuadores, debes estar preparado para la confiabilidad y la robustez. Entonces, los diseñamos con menos de cinco dedos para intentar controlar su complejidad. Seguimos explorando generaciones de ellos. Queremos un agarre dócil, adaptándonos a una variedad de formas con una rica sensación a bordo, para que entiendas cuándo estás en contacto.
Internamente, el aspecto más polémico del diseño bien puede ser la cabeza. La gran pantalla redonda tiene pantallas que recuerdan a un espejo de aumento.
“Era uno de los elementos de diseño que nos preocupaba bastante”, dice Playter. “Todos los demás tenían una especie de forma humanoide. Quería que fuera diferente. Queremos que sea amigable y abierto. Proporciona una paleta para una exhibición. Por supuesto, hay sensores enterrados allí, pero también la forma realmente pretende indicar cierta amistad. Eso será importante para interactuar con estas cosas en el futuro”.
Un Atlas para Navidad
Créditos de imagen: Dinámica de Boston
El panorama ha cambiado dramáticamente en la década transcurrida desde la introducción del Atlas hidráulico. Electric Atlas tiene bastante compañía, en forma de robots humanoides de Figure, Apptronik, Tesla y 1X, entre otros.
“Para nosotros, obviamente ha habido una gran afluencia de interés. Creo que esa afluencia ha estado motivada por tres acontecimientos. Boston Dynamics fue adquirida [by Hyundai] por casi mil millones de dólares. Eso despertó a todos y dijeron: ‘Vaya, hay un camino de salida’. Tesla expresa interés en fabricar cosas validadas que hemos estado haciendo durante mucho tiempo. Y luego, el surgimiento de la IA como herramienta para ayudar a abordar la generalidad está haciendo que todo esto sea factible. Hemos tenido paciencia al anunciarlo porque queríamos investigar lo suficiente para comprender que podemos resolver problemas de manipulación y tener confianza en una nueva generación de máquinas.
A pesar de la gran ventaja de Boston Dynamics en humanoides, Playter dice que la compañía construyó la primera construcción del nuevo robot alrededor de la Navidad de 2023. Antes de eso, estaba resolviendo muchos de los problemas más complejos de la simulación.
Al parecer, esta semana la compañía finalmente está lista para comenzar a mostrar lo que el robot puede hacer, o al menos las primeras etapas de lo que está planeando con el sistema.
Inteligencia general
Una cosa que definitivamente puedes decir sobre Elon Musk es que hace grandes promesas. En los primeros días de Optimus de cara al público, cuando el robot de Tesla parecía ser poco más que un ser humano vestido con spandex, el ejecutivo hablaba de un sistema que podía hacerlo todo. Su Optimus podría trabajar todo el día en la fábrica, hacer la compra y luego prepararle la cena. Ese es el sueño, ¿verdad?
La verdad del asunto, por supuesto, se construye en torno a pequeños pasos. Es posible que las empresas de robótica ya estén hablando de “humanoides de uso general”, pero sus sistemas están escalando una tarea a la vez. Para la mayoría, eso significa mover cargas útiles del punto A al B. Sin embargo, utilizar verdaderamente el factor de forma requerirá una inteligencia más generalizada.
Parece que el modelo de tienda de aplicaciones podría presentar el camino más claro allí. Después de todo, el acceso de los desarrolladores ha sido una parte importante del crecimiento del conjunto de funciones de Spot. Playter, sin embargo, dice que Boston Dynamics no adoptará ese enfoque con Atlas.
“Definitivamente vamos a centrarnos en una aplicación nosotros mismos y no en construir una plataforma”, afirma. Nuestra experiencia es que la manera de ir rápido es centrarnos en una aplicación y resolver los problemas, y no asumir que alguien más los resolverá por nosotros. Creo que la IA es una pieza esencial aquí. Para apoyar la generalidad de las tareas se necesitarán y se reforzarán con técnicas de IA”.
La empresa recientemente abierto acceso al algoritmo de aprendizaje por refuerzo de Spot para desarrolladores. Ese trabajo será fundamental para el creciente conjunto de habilidades de Atlas.
Fuera de la caja
Para tener éxito, explica Playter, los humanoides tienen que ir más allá de las cajas.
“Creo que se puede hacer eso con muchos otros robots”, afirma. “Los humanoides deben poder realizar una enorme variedad de tareas. Tienes dos manos. Quieres poder recoger formas geométricas complejas y pesadas que un simple recogedor de cajas no podría recoger, y tienes que hacer cientos de miles de ellas. Creo que el robot monotarea es cosa del pasado. Stretch es una de las últimas aplicaciones en las que puedes tener un robot simplemente moviendo cajas y hacerlo funcionar”.
Si no son cajas, ¿cuál será la tarea del nuevo Atlas en la feria de Hyundai? La respuesta se puede encontrar en un vídeo publicado por la empresa. en febreroen el que se vio la versión hidráulica del robot interactuando con los puntales del automóvil, los componentes de Hyundai a los que Playter aludió anteriormente.
“Nuestra larga trayectoria en movilidad dinámica significa que somos fuertes y sabemos cómo acomodar una carga útil pesada y aun así mantener una movilidad tremenda”, dice. “Creo que eso será un diferenciador para nosotros: poder captar cosas pesadas, complejas y masivas. Ese puntal en el video probablemente pesa 25 libras. Recogiendo ruedas: lanzaremos un video más adelante como parte de todo este esfuerzo que muestra un poco más de las tareas de manipulación con objetos del mundo real que hemos estado haciendo con Atlas. Estoy seguro de que sabemos cómo hacer esa parte y no he visto a otros hacerlo todavía”.